http://support.robotis.com/en/techsupport_eng.htm#product/thormang3_main.htm
Joint Name & ID map
U2D_CHANNEL2
| ID |
JointName |
| 1 |
l_leg_hip_y |
| 2 |
l_leg_hip_r |
| 3 |
l_leg_hip_p |
| 4 |
l_leg_kn_p |
| 5 |
l_leg_an_p |
| 6 |
l_leg_an_r |
U2D_CHANNEL3
| ID |
JointName |
| 11 |
r_leg_hip_y |
| 12 |
r_leg_hip_r |
| 13 |
r_leg_hip_p |
| 14 |
r_leg_kn_p |
| 15 |
r_leg_an_p |
| 16 |
r_leg_an_r |
- Default walking speed: 100.0 cm/sec.
- Management controller: Nucleo
- 20 actuator modules (6 DoF leg x2 + 3 DoF arm x2 + 2 DoF neck)
- Actuators with durable metalic gear (Dynamixel EX-106+)
- 1Mbps high-speed Dynamixel bus for joint control
- 3-axis gyro, 3-axis accelerometer
Actuator Spec Specifications
| Description |
EX-106+ |
| Weight |
82g |
| Dimension |
28.5mm x 25mm x 43mm |
| Gear Ratio |
333:1 |
| Stall Torque |
4.5 N.m |
| Stall Current |
2.3 A |
| No Load Speed |
55 RPM |
| Protocol |
1.0,2.0 |
The Mechanical Design of Uthai Humnaoid
ได้ตัวอย่างการออกแบบมาจากหุ่นยนต์ตัวไหนก็ไม่รู้ หาก่อน
Design concept
หุ่นยนต์ถูกออกแบบโดย แท้และเบิร์ด ตามคอนเซปด้านล่างนี้
- น้ำหนักเบา แข็งแรง ทนทาน
- ง่ายต่อการพัฒนาต่อยอด
Specifications of Uthai Humanoid
| Description |
Uthai Robot 1-A |
| Hight |
About 1030mm |
| Weight |
About 3.5kg |
| Hight of CoM |
800mm |
| Feet size |
150 x 150 mm |
| DOF |
12 xxxx |
| Actuator |
Dynamixel EX-106+ |
| Main Controller |
Odroid xxxx |
| Sub Controller |
Nucleo F411RE 100MHz ARM Cortex xxxx |
|
|
| Sensor |
3-Axis Gyroscope 3-Axis Accelerometer 3-Axis Magnetometer |
| Power Source |
LIPO or Switching Power Supply |
| Developement Environment |
OS: Linux, ROS, Python, C++, MATLAB, Dynamixel SDK |
| Networking |
Eternet WiFi |
DH-Parameter of Uthai Humaoid
| link(i) |
a(i) |
al(i) |
d(i) |
theta(i) |
| 1 |
0 |
pi/2 |
0 |
pi+\theta |
| 2 |
0 |
pi/2 |
0 |
pi+theta(1) |
| 3 |
0 |
pi/2 |
0 |
pi+theta(1) |
| 4 |
0 |
pi/2 |
0 |
pi+theta(1) |
| 5 |
0 |
pi/2 |
0 |
pi+theta(1) |
| 6 |
0 |
pi/2 |
0 |
pi+theta(1) |
| 7 |
0 |
pi/2 |
0 |
pi+theta(1) |
Physical Properties
Links
- Measurement overview

| body |
x |
y |
z |
| ground origin |
- |
- |
807.5 |
| origin |
0 |
0 |
170.5 |
| Left Leg |
x |
y |
z |
Right Leg |
x |
y |
z |
| base - 1 |
0 |
93 |
-18 |
base - 11 |
0 |
-93 |
-18 |
| 1 - 2 |
57 |
0 |
-75 |
11 - 12 |
57 |
0 |
-75 |
| 2 - 3 |
-57 |
33 |
0 |
12 - 13 |
-57 |
33 |
0 |
| 3 - 4 |
0 |
60 |
-300 |
13 - 14 |
0 |
-60 |
-300 |
| 4 - 5 |
0 |
-60 |
-300 |
14 - 15 |
0 |
60 |
-300 |
| 5 - 6 |
57 |
-33 |
0 |
15 - 16 |
57 |
33 |
0 |
| 6 - foot |
-57 |
0 |
-87 |
16 - foot |
-57 |
0 |
-87 |
Mass & Inertia
Whole robot
Mass = 5.0 [kg]
Body
|
|
|
|
|
|
|
|
|
|
|
|
| ID |
JointName |
Mass [kg] |
x |
y |
z |
xx |
xy |
xz |
yy |
yz |
zz |
|
|
|
|
|
|
|
|
|
|
|
Left Leg
Right Leg
Joint & Angle Limit

Left Leg Joint
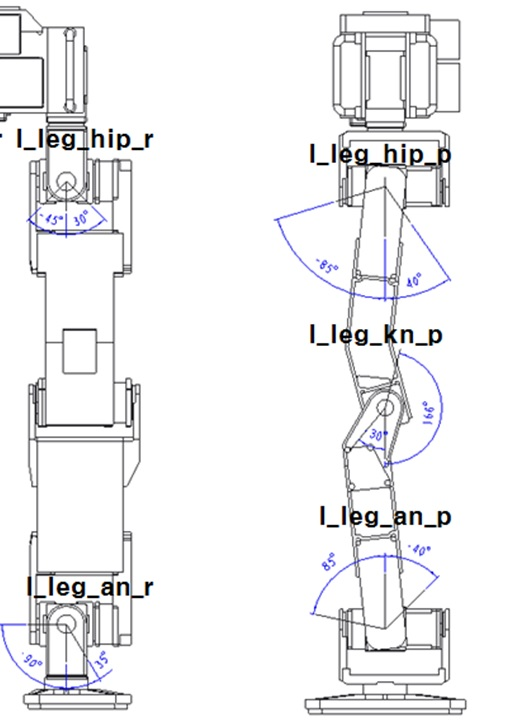
| ID |
JointName |
Range (degrees) |
| 1 |
l_hip_yaw |
-150 to 150 |
| 2 |
l_hip_roll |
-30 to 45 |
| 3 |
l_hip_pitch |
-40 to 85 |
| 4 |
l_knee_pitch |
-150 to 30 |
| 5 |
l_ankle_pitch |
-85 to 40 |
| 6 |
l_ankle_roll |
-35 to 90 |
Right Leg Joint
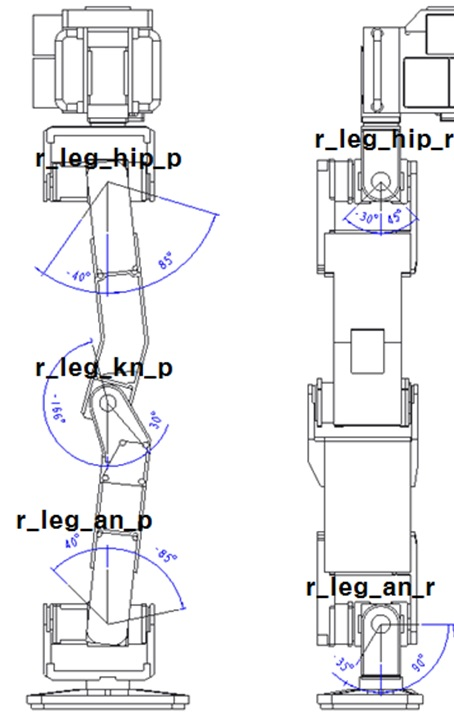
| ID |
JointName |
Range (degrees) |
| 11 |
r_hip_yaw |
-150 to 150 |
| 12 |
r_hip_roll |
-30 to 45 |
| 13 |
r_hip_pitch |
-40 to 85 |
| 14 |
r_knee_pitch |
-150 to 30 |
| 15 |
r_ankle_pitch |
-85 to 40 |
| 16 |
r_ankle_roll |
-35 to 90 |