Make URDF from Robot model in Solidworks
Simulation vs Visualize
Simulation เกิดจาการคำนวณทางฟิสิกส์ ไม่เหมือน Visualizes ที่เกิดจาการคำนวณ kinamtic อย่างเดียว
Visualize ยกตัวอย่างสั่งหุ่นยนต์เดินให้ไป 1 เมตร หุ่นยนต์ก้จะไปที่ 1 เมตร แต่หุ่นยนต์ไปจริงหรือไม่ไม่รู้
แต่ถ้าเป็น simulation จะเป็นการคำนวณที่หากเราใส่ Property ไม่เหมาะสมก็อาจจะทำให้หุ่นยนต์ไม่ไปก็ได้
Modeling Robot
เป็นการเขียนไฟล์เพื่ออธิบายว่าหุ่นยนต์ของเรามีหน้าตาอย่างไร ล้อห่างจากเซนเตอร์กี่เซนติเมตร
Simple Robot Model in URDF
ใน package จะมี dyrectory ชื่อ urdf ซึ่งข้างในจะมีไฟล์ urdf ของหุ่นยนต์หลายๆตัวได้ หรือแบ่งส่วนๆได้
<?xml version="1.0"?>
<robot name="myfirst">
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
</visual>
</link>
</robot>
Multiple Shapes
<?xml version="1.0"?>
<robot name="multipleshapes">
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
</visual>
</link>
<link name="right_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
</visual>
</link>
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="right_leg"/>
</joint>
</robot>
3D Modeling in ROS [URDF]
หลังจากที่เราได้ออกแบบและโมเดลหุ่นยนต์ของเราขึ้นมาที่ใช้ CAD tools ต่างๆ เช่น AutoCAD, SolidWorks, Blender หรืออื่นๆ ก็เพื่อที่จะนำมาใช้ในการทำ Simulation การที่เราทำ Simulation นั้นก็จะสามารถมองเห็นหุ่นยนต์และเห็นการทำงานของหุ่นยนต์เราก่อนที่เราจะสร้างมันขึ้นมาจริงๆ
หุ่นยนต์จำลองที่เราสร้างขึ้นมานั้นควรที่จะมีลักษณะให้ใกล้เคียงกับของจริงมากที่สุด ไม่ว่าจะเป็นรูปร่าง รูปทรง น้ำหนักต่างๆ
ROS packages for robot modeling
ROS นั้นได้ให้เครื่องมือที่ช่วยให้เราสามารถสร้าง 3D robot models ได้
robot_model : ใน ROS มี meta package ที่ชื่อว่า robot_model ซึ่งข้างในมี package ต่างๆที่ใช้สำหรับสร้าง 3D robot models
- urdf : เป็น 1 ในหลายๆ package ที่อยู่ใน robot_model, urdf เป็น xml ไฟล์ที่เอาไว้ใช้บอกลักษณะของหุ่นยนต์ ย่อมาจาก Unified Robot Description Format(URDF)
เราสามารถระบุ robot model, sensors และ working environment โดยใช้ URDF การบอกนั้นจะสามารถบอกเป็นเหมือน tree structure ของ link ต่างๆในตัวหุ่นยนต์ สามารถบอก rigid link เชื่อมต่อกันผ่าน joints แต่ถ้าเป็น flexible link จะไม่สามารถบอกได้โดยใช้ urdf
- joint_state_publisher: เครื่องมือนี้มีประโยชน์มากในการ model robot URDF เพราะมันสามารถหา joints ทุก joint ที่ไม่ใช่ fixed joints มาแสดงเป็น GUI sliders ทำให้เราสามารถเลื่อนๆหมุนๆไปมาได้ อีกทั้งยังสามารถใช้งานร่วมกับ visualize RViz
- robot_state_publisher: เป็นเครื่องมือที่ใช้ในการ publish 3d pose ของ link ต่างๆใน urdf การ ยublish นั้นจะใช้ ROS tf(transform) ROStf คือการหาความสัมพันธ์ระหว่าง frame ของหุ่นยนต์
- xacro: ย่อมาจาก XML Macros หรือเราสามารถเรียกอีกอย่างว่า URDF plus add-ons. ซึ่งการทำงานเหมือนกับ urdf แต่ทำให้ไฟล์ urdf สั้นกว่า อ่านง่ายกว่า และสามารถใช้เพื่อทำให้สร้างหุ่นยนต์ที่มีความซับซ้อนง่ายขึ้น เราสามารถแปลงไฟล์ xacro เป็น urdf ได้
Understanding robot modeling [URDF]
จากที่พูดไปแล้วเกี่ยวกับ urdf ที่จะช่วยสร้าง model robot แต่ก่อนอื่นเลยเราจะสร้างนั้นเราก็จำเป็นที่จะต้องสร้างไฟล์ .urdf ขึ้นมาก่อน
ไฟล์ URDF สามารถใส่ kinematic dynamic ของหุ่นยนต์ได้ visual collision
ส่วนประกอบของ tags แต่ละอันใน urdf robot model
- link: ลิ้งจะแสดงถึง single link ของหุ่นยนต์ สามารถใช้ tag นี้ได้ อีกทั้งเรายังสามารถใส่ properties ได้อีกด้วย เช่น size shape color หรือเรายังสามารถใส่ 3d mesh ลงไปใน link ได้ สามารถใส่ dynamic properties เช่น inertial matrix และ collision properties
syntax จะเป็นประมาณนี้
<link name="<name_of_link>">
<inertial> .......... </inertial>
<visual> .......... </visual>
<collision> .......... </collision>
</link>
 ตัว code ด้านบนจะบอกเพียงแค่ 1 link เท่านั้น มีส่วนของ visual ที่เป็น real link ของหุ่นยนต์จริงๆ ส่วนที่รอบๆจะเป็นส่วน Collision ควรจะทำให้ใหญ่กว่านิดหน่อยเพราะจะได้ตรวจพบได้ก่อนที่จะเกิดการชนกันจริงๆ
ตัว code ด้านบนจะบอกเพียงแค่ 1 link เท่านั้น มีส่วนของ visual ที่เป็น real link ของหุ่นยนต์จริงๆ ส่วนที่รอบๆจะเป็นส่วน Collision ควรจะทำให้ใหญ่กว่านิดหน่อยเพราะจะได้ตรวจพบได้ก่อนที่จะเกิดการชนกันจริงๆ
- joint: ข้อต่อ จะแสดงถึง joint ของหุ่นยนต์ สามารถกำหนด kinematics dynamics ของ joint ได้ เช่น ใส่ limit ไม่ให้ joint เคลื่อนที่เกิน กำหนดความเร็วของ joint ได้ ชนิดของ joint ใน urdf มีอยู่ทั้งหมด 6 ชนิด คือ revolute, continous, prismatic, fixed, floating และ planar
syntax จะเป็นประมาณนี้
<joint name="<name_of_joint>" type="<type_of_joint>">
<parent link="<name_of_parent_link>"/>
<child link"<name_of_child_link>"/>
<calibration ... />
<dynamics damping ... />
<limit effort ... />
</joint>
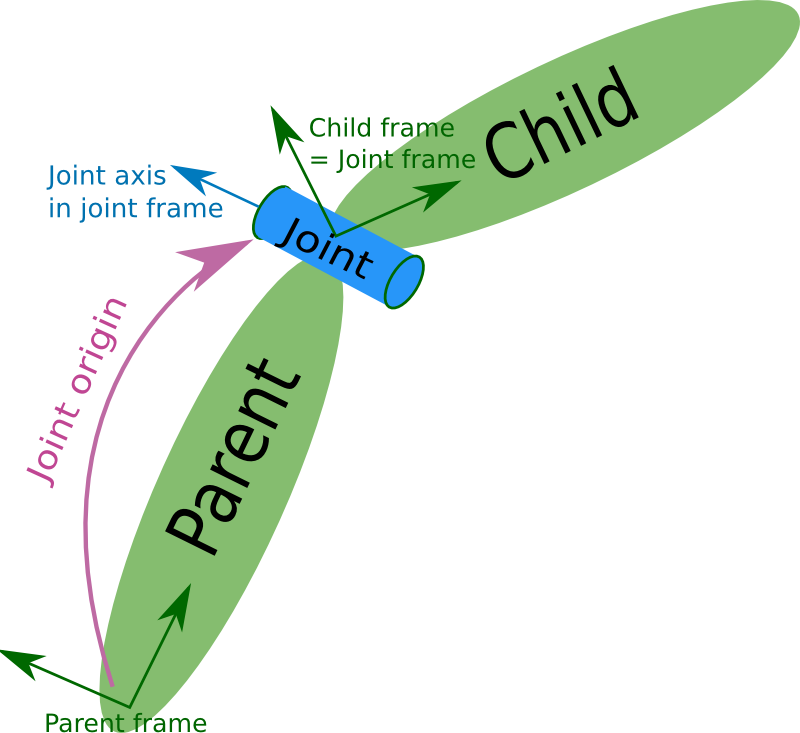 URDF joint จะเป็นการเปลี่ยนของ 2 link ซึ่งลิ้งแรกจะเรียกว่า Parrent link ส่วนอีกอันจะเรียก Child link
URDF joint จะเป็นการเปลี่ยนของ 2 link ซึ่งลิ้งแรกจะเรียกว่า Parrent link ส่วนอีกอันจะเรียก Child link